作成しているcontrollerは以下のような構造になっている。

←この部分がcore moduleになる。
clock domain はbf_clk (bus i/f clock)、wr_clk系、rd_clk系の3つだ。
CMD QUEUE, WDT QUEUEは非同期FIFOでここでclockの乗換も兼ねている。非同期FIFOの為同期損が発生し、同期式の場合と比べてlatencyが増加してしまうが反面bus i/f側と異なる周波数に出来るので全体的な設計は容易になると考えている。また、非同期FIFOはPHY_DPにも存在する。これはread data用である。
BCはbank controllerだ。本設計ではbank単位でpage管理を行おうと考えているので4つある。CPはcommand path controllerでBCからのaccess要求を調停して勝者の要求を実効する。各BCからCPへの要求信号はhreqとlreqがあり、Bank ActiveやPrecharge等の要求はhreqに、readやwriteの要求はlreqに出す。信号名からも自明なようにhreqの方が優先度は高く、CPはhreqの方を優先して処理する。
また、単にmodule構成の話ではあるが、wr_clk, rd_clkを作るDCM部はcore module内に持つことにした。その構成は今のところ以下の方針でいこうと考えている。
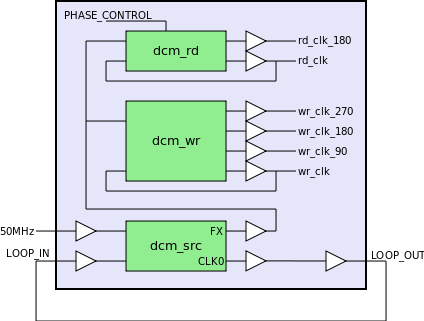
dcm_srcで周波数を作り、dcm_wr, dcm_rdで位相を作る。
dcm_srcのfeed back pathはSpartan3A Starter KitではLOOP_OUTとLOOP_INというそれ用と思われる配線があるのでその経路を使うことにした。(Starter Kitのdemoの設計資料は回路図とUCFファイル以外は参照していない。)
まだ実機動作はおろか合成すらしていないのでもしかしたら修正になるかも知れないが。。。
Micronのweb siteからsimulation modelを入手してsimulationにも着手した。



これは同一bankからの連続readの場合だ。bankがactiveの状態で開始しているのでread latencyは最小の場合だ。波形から17だ。
readではCommand queue部の同期損にPHY_DP部の非同期FIFOの同期損が加わるためlatencyは悪化してしまう。また、上述のlatency値はcore moduleのみの値であるがaccessを要求する側から見れば、MULTI PORT I/F部のlatencyも加味されることになる。


























