今回は、サービスリクエスト、シリアルポールと割込み等の確認をおこなった。
・パラレルポール
パラレルポールであるが、現有GPIB I/F付き装置の資料を参照したところ、何れの装置も非サポートとあるため現状実機確認不可である。それほど積極的に使う機能では無いのかも知れない。
・シリアルポール
テクトロのオシロはアプリケーションメニュー機能というのがあって、画面にユーザ独自のメニューを表示して操作者がボタンで一つ項目を選択すると、GP-IBのサービスリクエストでイベントを通知させられる。 この機能を利用してサービスリクエスト、シリアルポール、割込みの動作確認をすることにしたのだが、シリアルポールで想定外の事象に遭遇した。またもや、私のGP-IB規格の解釈に誤りがあるのかも知れない。
シリアルポールの手順は、コントローラがバスをコマンドモードにしてSPEコマンドをバスに送信し、次にTA_nメッセージでポーリングする対象をトーカーに指定する。それからバスのモードをデータモードにすると、指定されたデバイスはステータスバイトをバスに送信する。複数のデバイスをポーリングする場合はTA_n指定、ステータスバイト受信の処理を必要数繰り返し、最後にバスをコマンドモードにしてSPDコマンドを送出してシリアルポールを終了する。(バスに通知する。)
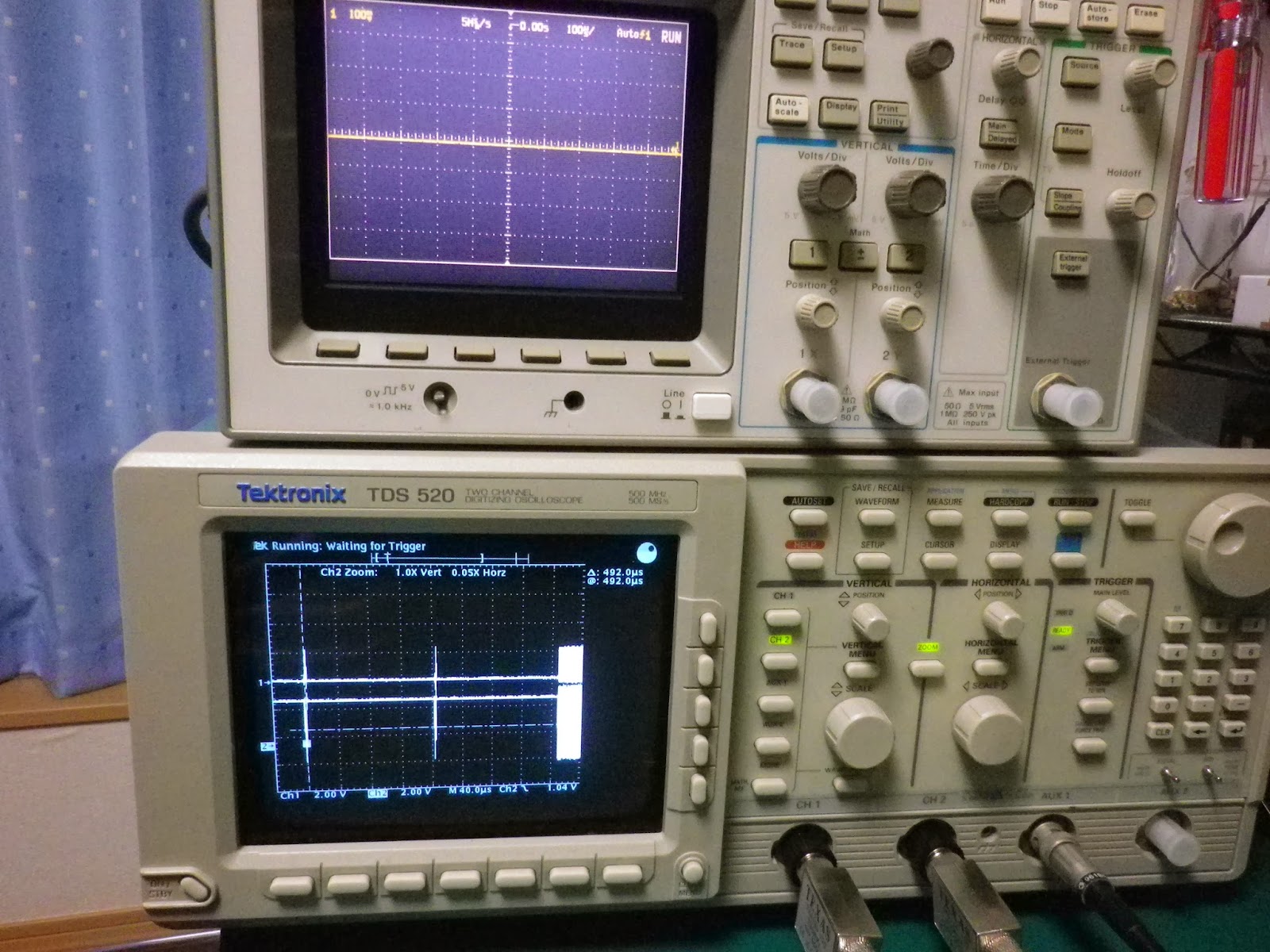
デジタルオシロに対してシリアルポールを行ったところ、以下のようになった。

右端の白い領域がオシロがステータスバイトを出力している部分で、写真の通り複数バイトが連続して出力されている。朝日新聞社編の「プロトコルハンドブック」によれば、このステータスバイトは標準的には1バイト長であるが、多バイト長でもよく最終バイトにはEOIが付加されるとある。

現状のIPはこの記述を参考にして複数バイトにも対応するよう作ってある。
上記で出力されるバイト列は有限長なのか見てみたのだが、何バイト受信しても途切れることが無く、また値はすべて同一であった。 ACタイミング的な問題を疑ってもみたのだが、以下のようにハンドシェイクに問題があるとは思えない。もしあれば通常のハンドシェイクも問題が出る筈だ。

そこで、HPのオシロではどうか見てみたところ同じ動作だった。


GP-620というGP-IBアダプタの場合は1バイト長であった。


GP-620の資料によると、この装置はNIのGP-IBコントローラを使っているようである。もしかすると、両オシロはコントローラが違うのかも知れない。即ち、この動作はコントローラ依存なのかも知れない。オシロの蓋を開けて内部を確認すればハッキリするがそこまではしたくない。
岡村廸夫氏の「標準ディジタル・バス(IEEE-488)とその応用」ではステータスバイトについて以下の様に書かれている。

ということで、この動作は規格上もあり得るものなのかも知れない。 ただ、そうなると一つの疑問が出てくる。 トーカー指定を切り替えるにも、また、シリアルポールを終了するためにも、コントローラはバスのモードをコマンドモードに変更して行う必要がある。しかし、ステータスバイト送出側がその完了を通知しない以上、どのタイミングでそれを行うべきかの判断が難しい。。。気がする。
何も考えずにATN信号を操作すると、ハンドシェイクのど真ん中でそれが行われる可能性もある。そのような場合でも問題なくモードが変わり通信が行われていくか・・・? そうなると、コントローラ側が意図的にハンドシェイクへの応答を止めて停止期間を作り、そのタイミングでモードを変える等の動作が必要になると思われる。 本IPの受信FIFOの深度は32段なので、その分の転送は止めようが無いが、FIFOからの読み出しを行わなければFIFOがFULLになった時点でハンドシェイクを停止させることは可能だ。そこで、このやり方で停止期間を作ってバスのモードを変更することにした。これはソフトウェアでの処理になる。 何とも泥臭い処理である。
また、念のためハンドシェイク停止時はNRFDがLとなるよう、gpib_lsn.vの変更も行った。

上記の処置をして動作確認を続けた。
ソフトウェアは以下の通り。 main()でメニューやサービスリクエストで上げるイベントの種別を設定後割込みを許可し無限ループに入る。 サービスリクエストが発生・即ち、SREQがLになると割込みが発生し、hw_interrupt()が実行される。

シリアルポール処理部

ここに示したプログラムはあくまでも動作確認のためのものなので、余計なprintfがあったり、関数の戻り値に実用性が無かったりする。
オシロの画面

メニューの右側のボタンを押下するとイベントが発生する。
プログラムの出力

一応、サービスリクエスト、シリアルポール、割込みも全ての要因ではないが確認は取れた。
後は測定器を制御したり測定値を吸い上げたりといったソフトウェアを作成していくことになるが、これは追々やっていくことにする。 ということで、これでGP-IB IPとCommunication Box作成のプロジェクトは終えようと思う。
今回のプロジェクトでは必要な部・機材関係を格安で入手出来る等、幾つもの幸運なことがあった。
LatticeのMachXO2を初めて使ってみたが使いやすい良いデバイスだと感じた。と言っても性能限界まで使っている訳ではないが。。。 もっと色々なものを作ってみたいと思わせてくれるデバイスではある。
RTL置き場 (http://www.hi-ho.ne.jp/bravo-fpga/)のsnapshotは最新版に更新した。





























