前回オープンドレインのiCE40の開発環境ではRTL記述が出来ないようだと書いたが問題ないようだ。 I2C IPのデータバス部のポート接続部に記述ミスがあったのでそういうのを修正したら、オープンドレイン記述も通るようになった。その結果、SB_IOをインスタンスする必要も無くなった。

生成されたシミュレーション用ネットリスト

で、漸く合成も出来た。 リソースの使用率は60%弱となった。


クロックは50MHzを外部から入力するつもりでいたのだが、50MHzだとタイミングがmetしなかった。色々試したが、結局20MHzに下げることにした。

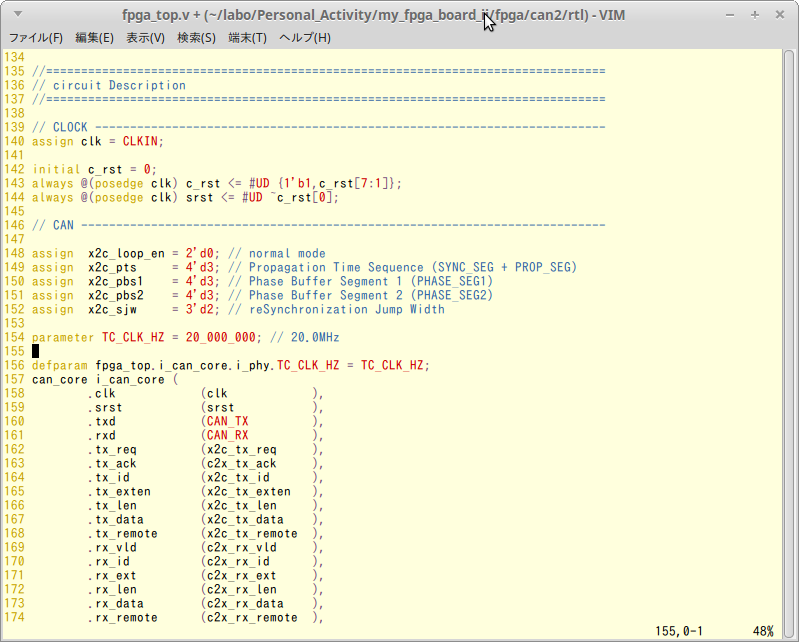
私のCAN IPはクロックはデフォルトで50MHzだがparameterで変えられるようにしてある。

トップモジュール(fpga_top)のcan_coreインスタンス部でdefparam文で20MHzにした。
漸くステージを一つクリア出来た。もう少しで実機動作確認に入れそうだ。
CANの通信相手が必要だが、ZynqはCAN IPを持っているのでこれを使ってみようと考えている。

ZYBOのMIO PMODコネクタにCANの信号を出せる筈だと思うのだが、リファレンスマニュアルからは読み取れない。

ZYNQのTRMを見る限りでは出来そうなんだが・・・

さーて、どうなりますか。。。



0 件のコメント:
コメントを投稿